
Made by Professor Yingxiang Liu’s Team at HIT
Professor Yingxiang Liu’s team at the State Key Laboratory of Robotics and Systems, Harbin Institute of Technology (HIT), has made significant strides in developing piezoelectric robotic manipulators. Their latest study, titled A Compact 2-DOF Cross-Scale Piezoelectric Robotic Manipulator with Adjustable Force for Biological Delicate Puncture, was published in the renowned journal IEEE Transactions on Robotics. The team successfully designed a novel piezoelectric robotic manipulator for delicate puncture of curved fine blood vessels, which provides an effective solution to combine multi-dimensional motion, large working range, high precision, and large puncture force, and is a critical advancement in the micro-puncture application of micro-sized organisms such as cells and blood vessels.
Biological micromanipulation is a common supporting technology in the field of biomedical engineering and an important application of robotic technology, mainly including micro-positioning, micro-gripping, micro-puncture and micro-injection, etc. Among them, micro-puncture of cells and blood vessels with complex shapes is the most challenging task. Existing robotic manipulators have many limitations in terms of dimension, motion scale, precision, force, electromagnetic compatibility and structural compactness. To address these limitations, Prof. Liu’s team proposed an innovative design for a robotic manipulator based on the actuation using single actuator, dual modules and multi-dimensional trajectory to achieve linear-rotational two-dimensional (2D) motions, overcoming structural and actuation constraints of traditional robotic manipulators.
The newly developed manipulator integrates a piezoelectric driving module with multi-flexure hinges and a longitudinal-bending-bending piezoelectric actuation element, enabling decoupled 3D linear trajectory output. By combining driving module, locking module, and optical shaft, the manipulator achieved a compact structure and precise force adjustment. An actuation method with bipedal multi-dimensional trajectory collaborative stepping is proposed to realize 2D cross-scale motions without rollback. Theoretical analyses and finite element simulations guided the optimization of structural parameters for displacement response and puncture force.
Experimental validation demonstrated remarkable performance: the manipulator achieved a linear motion range of 38.5 mm, rotation range of 360°, displacement resolutions of 48 nm and 0.38 μrad, and an adjustable puncture force range of 1.70 mN to 301.34 mN with a resolution of 0.13 mN. These results resolve the longstanding challenge of combining multi- dimensional, large working range, high precision, and large puncture force in a single robotic manipulator.
The team further developed a dedicated handheld controller and integrated the manipulator with a self-designed 6-degree-of-freedom piezoelectric platform to build a robotic micro-puncture system. The experimental tests confirmed the manipulator’s capability to puncture 100 μm-scale straight silicone vessels under varying forces and a 780 μm outer-diameter curved silicone vessel under 300 mN force. These achievements highlight its potential in diverse biomedical applications, offering a versatile tool for delicate puncture on cells and vessels of varying sizes and morphologies.
This research not only advances the design of piezoelectric robotic systems but also paves the way for next-generation medical robotics in minimally invasive procedures.
Paper link: https://ieeexplore.ieee.org/document/10682496
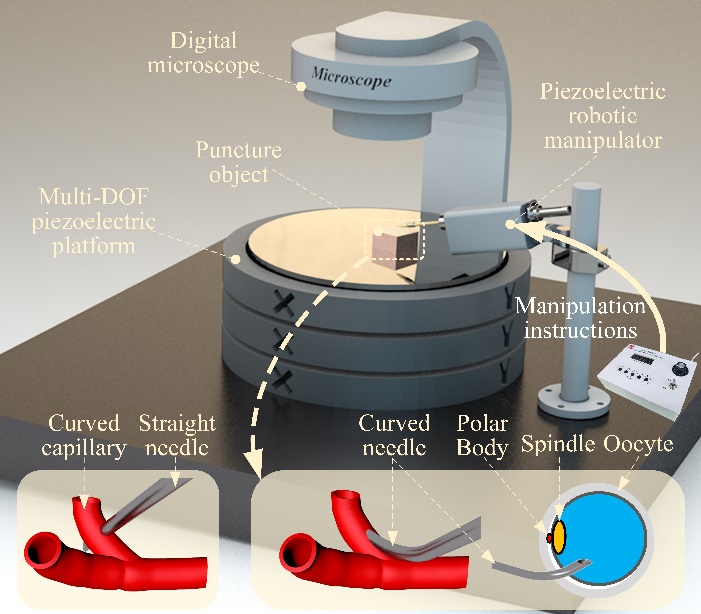
Fig. 1. Robotic micromanipulation system for delicate puncture of cellular and vascular organisms
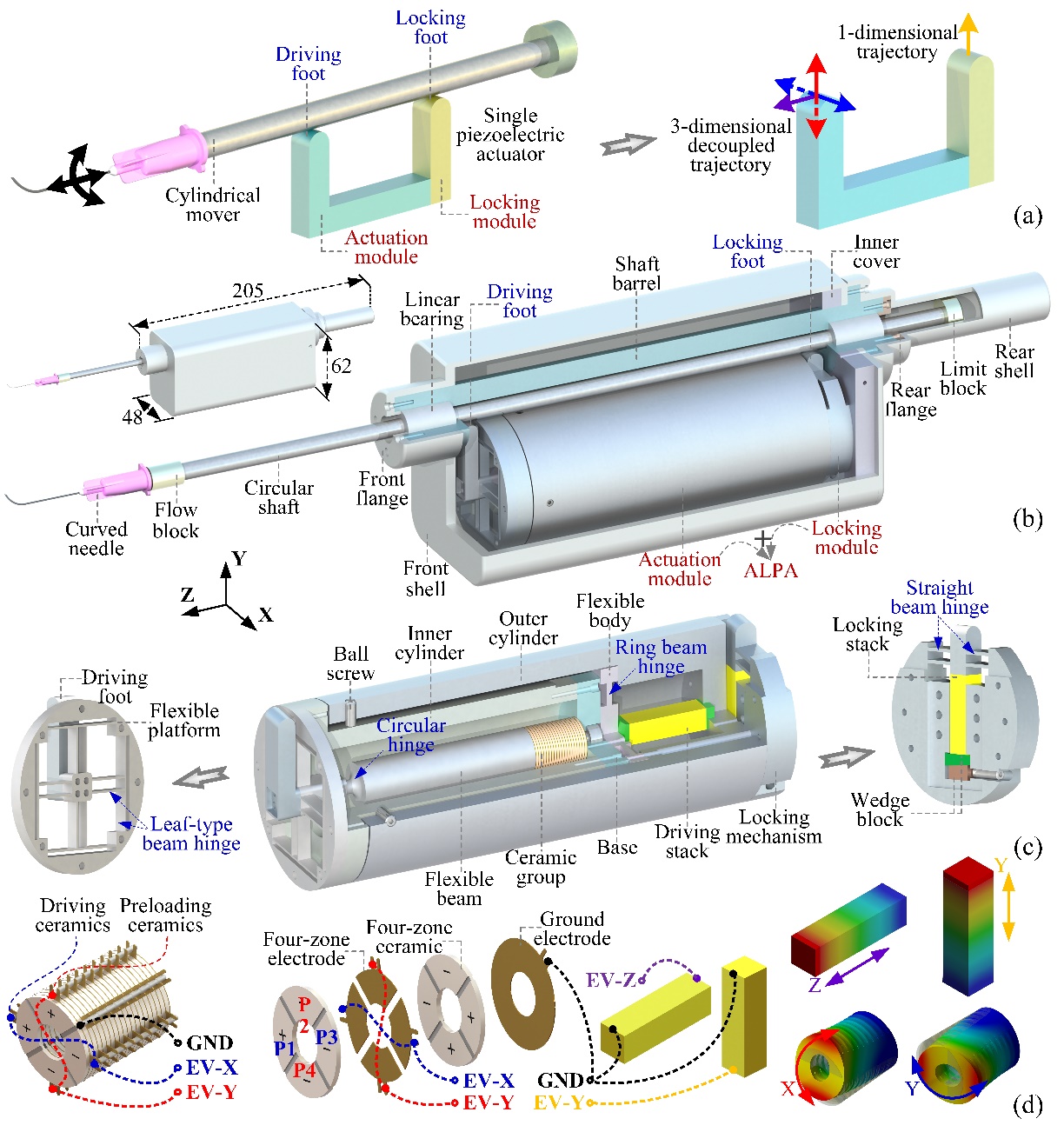
Fig. 2. Configurations of the 2-DOF piezoelectric robotic manipulator
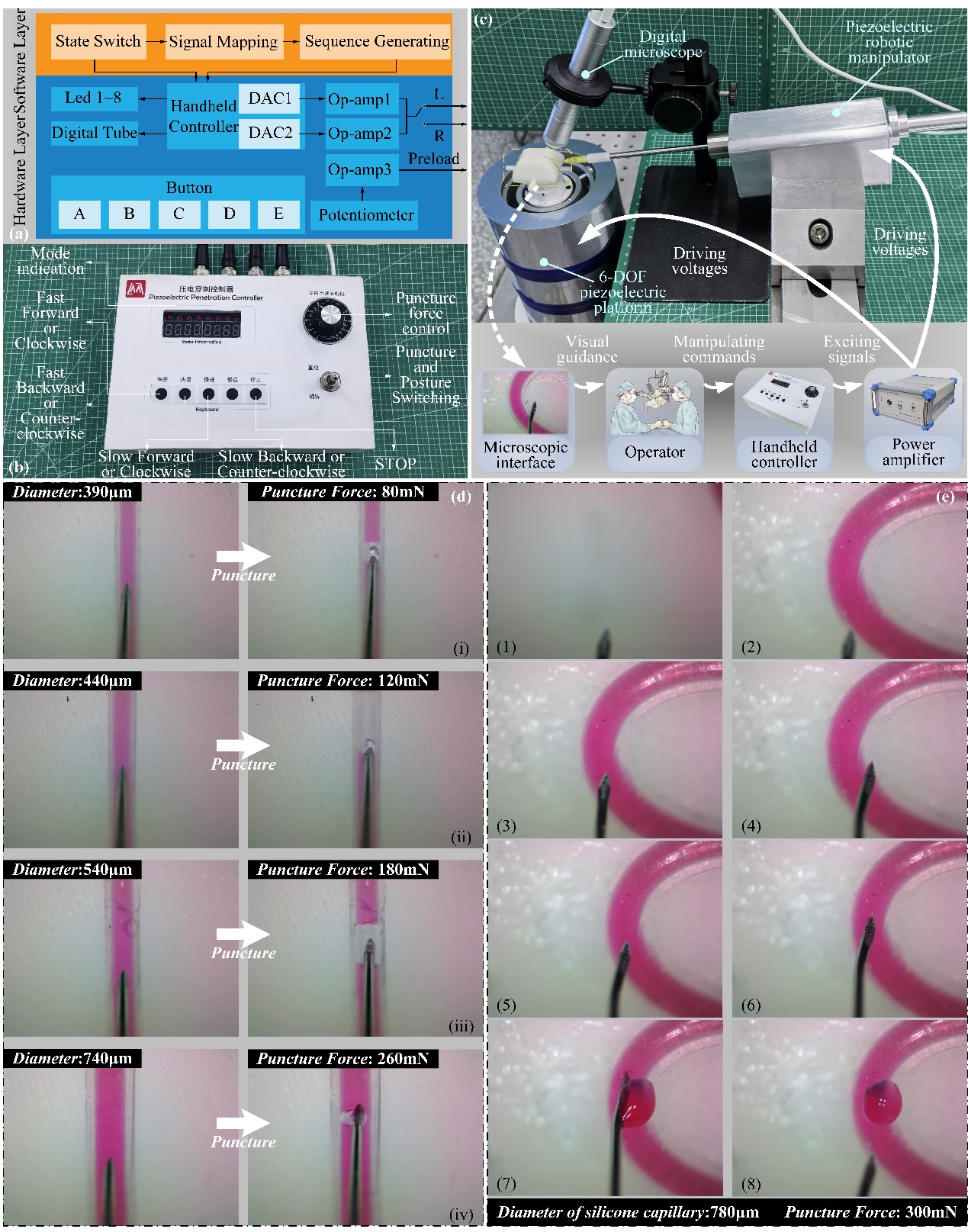
Fig. 3. Handheld controller of the PERM, construction of the multidimensional piezoelectric robotic micropuncture system, and silicone capillaries micro puncture