
A research team led by Professor Liu Yingxiang from the State Key Laboratory of Robotics and Systems, Harbin Institute of Technology (HIT), has made significant progress in the field of centimeter-scale piezoelectric robots.
The study, titled Omnidirectional Motion of an Untethered Tripodal Microrobot Using Radial Piezoelectric Actuators, was published in the journal Nature Communications.
The untethered omnidirectional tripodal piezoelectric robot is compact (Φ3.10 × 2.75 cm3, weighing 12.2 grams) and is based on circumferentially distributed piezoelectric actuators.
By synthesizing six basic driving forces in the radial direction using three circumferentially distributed piezoelectric units, and combining this with a trajectory interpolation algorithm, the robot can achieve planar omnidirectional movement without attitude adjustments.
The robot can not only move effectively while carrying a load 13.63 times its own weight, but it also maintains solid motion functionality after surviving a 0.6-meter drop effect and a static pressure 559 times its own weight.
Furthermore, by switching between high-frequency continuous excitation and intermittent excitation modes, the robot possesses cross-scale motion capabilities ranging from a macroscopic speed of 3 centimeters per second to a micro-step size of 0.56 micrometers.
Experimental results show it can achieve autonomous movement along specified trajectories and demonstrate multi-robot leader-follower coordination. It has also successfully performed various tests, including maze crossing, gas leak detection, wafer scratch detection, and cross-scale microscopic observation.
In the future, this robot is expected to be combined with micro-operation units to further expand its multi-robot collaborative operation and complex task execution capabilities in confined environments.
HIT is the sole affiliation and corresponding institution in the paper. Professor Liu and Professor Deng Jie are the co-corresponding authors. Doctoral student GaoYu, Associate Professor Li Jin, and Associate Researcher Zhang Shijing are the co-first authors. Professor Yan Jipeng, master's student Zhan Yiling, and doctoral students Liu Baoyi, Guan Jinghan, and Wang Dehong are co-authors.
This work was supported by the National Natural Science Foundation of China, the Postdoctoral Science Special Foundation of Heilongjiang, the Research Project of State Key Laboratory of Mechanical System and Vibration, and the China Postdoctoral Science Foundation.
Paper link: https://www.nature.com/articles/s41467-026-72449-x
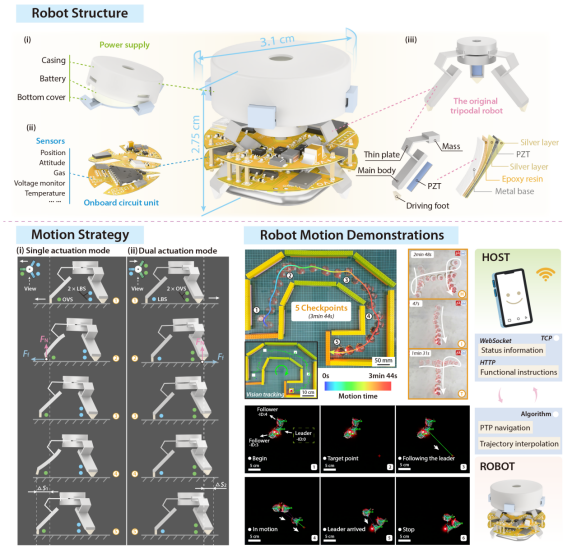
The motion strategy and experimental demonstrations of the tripodal piezoelectric robot. [Photo/hit.edu.cn]
The structural design and application demonstrations. [Photo/hit.edu.cn]