Reported by: Wang Ji
Translated by: Qiao Xuechao
Edited by: D. Parker
Time: 2017/10/10
Professor. Zhang Guangyu and Li Longqiu from HIT Mechatronics Engineering School in collaboration with Professor. Joseph•Wang from UC San Diego, have achieved significant progress in magnetic micro-vehicles. The research achievements—Highly Efficient Freestyle Magnetic Nanoswimmer and Autonomous Collision-Free Navigation of Micro-vehicles in Complex and Dynamically Changing Environments are respectively published in the international academic journal Nano Letters (Nano Letters, 2017, 17, 5092-5098, SCI IF: 12.7) and ACS Nano (ACS Nano, 2017,11, 9268-9275, SCI IF: 13.9). The first author of these two essays is Dr. Li Tianlong, a teacher at HIT. The corresponding author is Professor Li Longqiu.
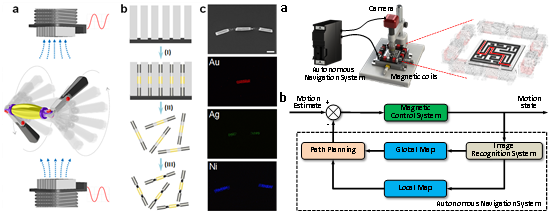
Micro-vehicles refer to nano machines which can transform various forms of energy into mechanical motion at micro-and nanoscales. Owing to the features of their small-size and high loading capabilities, micro-vehicles are expected to have great application prospects for drug targeting transportation and tumor precise treatment through traversing biological tissues. However, achieving efficient transportation and realizing accurate manipulation in the complex environment of the human body, are two challenges faced by drug targeting. Adapting bionics principles, the research team initially invented a nano machine made of nickel, silver, gold and other composites, which are driven by an oscillating magnetic field. Such a nano machine is a vehicle, whose diameter is 40nm, made with a multi-section flexible hinge. It can move rapidly in low Reynolds numbers fluid which simulates a swimmers’ two-arms alternating movement in water. This greatly improves the movement efficiency of nano vehicles driven by magnets. Experiments showed that the new two-arm nano vehicles can reach 60 height per second, ten times as much as normal flexible nano vehicles. Such micro-vehicles can not only move in water solutions, but also can move rapidly in serum and other biotic environments. Direction of motion can be controlled through changing the direction of the exogenous magnetic field. Such significant research achievements give new thoughts to the promotion of micro-vehicles’ power efficiency and loading capabilities.
The research team introduced artificial intelligent technology into the movement control of micro-vehicles to upgrade the capability of micro-vehicles in obstacle avoidance, navigation and accurate identification. They invented an intelligent micro-vehicle which can achieve accurate identification in complex environments. The fully automatic navigation system of such micro-vehicles is produced by image detection and identification units, artificial intelligent controllers and a magnetic field regulated actuator. The image detection and identification unit offers a Janus spherical mirco-vehicle that is driven by chemicals in real-time location, while providing an ideal collisionless motion path through detecting surrounding environments. Controlled by hand movement or a semi-automatic method, traditional micro-vehicles can only move in a scheduled path in two-dimensional or three-dimensional space. This results in the defects of low control accuracy and intelligent degree and slow response speed. However, the newly invented micro-vehicle can automatically conduct the path plan, navigate and avoid barriers in complex environment. In addition, it can identify objects in a timely manner, such as the identification between cancer cells and norm erythrocytes. This intelligent micro-vehicle system has huge application prospects in the diagnoses and treatments among complex biological systems.
The above-mentioned two achievements received financial support from the Natural Science Foundation of China and the Robotic Technology and System of National Key Laboratory Fund.
The website links of the papers:
http://pubs.acs.org/doi/abs/10.1021/acs.nanolett.7b02383
http://pubs.acs.org/doi/abs/10.1021/acsnano.7b04525