
Professor Zhu Yanhe, a member of Professor Zhao Jie's research team at the State Key Laboratory of Robotics and Systems, Harbin Institute of Technology (HIT), has registered noteworthy progress in the self-repair of space modular robots.
The research work, entitled Fault-tolerant modular robotic swarm through cooperative reconfiguration for large-scale on-orbit assembly, was published recently in the International Journal of Extreme Manufacturing.
This study provides a new design concept and technical support for fault tolerance in the development of highly robust and self-sustaining robotic swarms in complex and harsh space environments.
The space environment is characterized by extreme and harsh conditions such as being a vacuum almost devoid of matter, as well as microgravity, large temperature variations, and intense radiation. Ensuring the safe and reliable operation of space robots is a prerequisite for on-orbit servicing. Conventional approaches mainly rely on improving the reliability of components to prevent failures. However, in extreme environments, unexpected failures are always difficult to avoid completely.
Manual maintenance not only involves serious safety risks and high costs, but spare components for replacement are often not available in time. As such, under these extreme conditions with limited spare resources, developing autonomous fault tolerance and self-repair capabilities without external system intervention remains a key challenge.
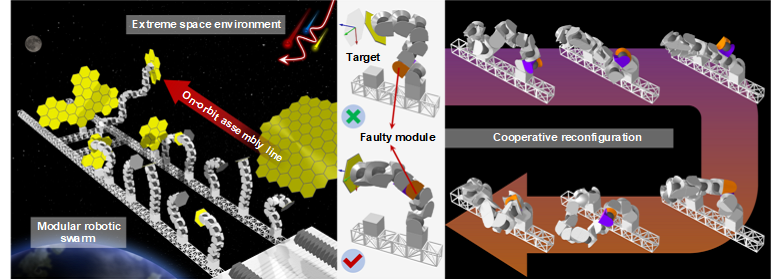
The scenario of on-orbit assembly by a modular robotic swarm and the fault-tolerant process through cooperative reconfiguration. [Photo/hit.edu.cn]
To address this challenge, the team proposed an autonomous fault-tolerant and self-repair strategy for modular robots based on cooperative reconfiguration, which recovers the damage caused by joint failures through morphological change. Notably, this process does not require spare modules to replace faulty ones, making it better suited to resource-constrained and extreme on-orbit environments. Based on the local perception capability among modules and the product of exponentials (PoE) formula, the team established a topological representation and kinematic self-modeling method for modular robots. After a failure occurs, the target configuration for reconfiguration is obtained using particle swarm optimization (PSO), with the objective of maximizing the robot’s manipulation capability. A cooperative reconfiguration algorithm based on an improved rapidly-exploring random tree (RRT) algorithm guides path nodes to avoid infeasible regions, improving the sampling efficiency and planning success rate, and enabling the modular robot to transition from an initial faulty configuration to a new configuration capable of accomplishing the task.
Experimental analysis of the assembly task verified that the proposed method can enhance the fault tolerance of the robot. In predefined extreme scenarios involving multiple failures, compared with a fault-tolerant method that relies solely on redundancy in a fixed configuration, cooperative reconfiguration increases the upper limit of fault tolerance by seven times. In addition, when task-environment constraints are considered, a fixed-configuration robot may still fail even with additional redundancy, further highlighting the advantages of cooperative reconfiguration. In particular, in a serial assembly line composed of a large-scale robotic swarm, a local failure may paralyze the entire assembly line.
In this case, cooperative reconfiguration improves the self-sustaining capability of the whole swarm system through local repair, preventing a small local fault from bringing down the entire system. The reconfiguration-based fault-tolerant strategy proposed by the team is expected not only to safeguard the assembly and manufacturing capabilities of space robotic swarms, but also to be extended to extreme scenarios with frequent failures and limited resources, such as deep-sea exploration and nuclear facility maintenance, providing a new design concept for the development of robust robotic swarms.
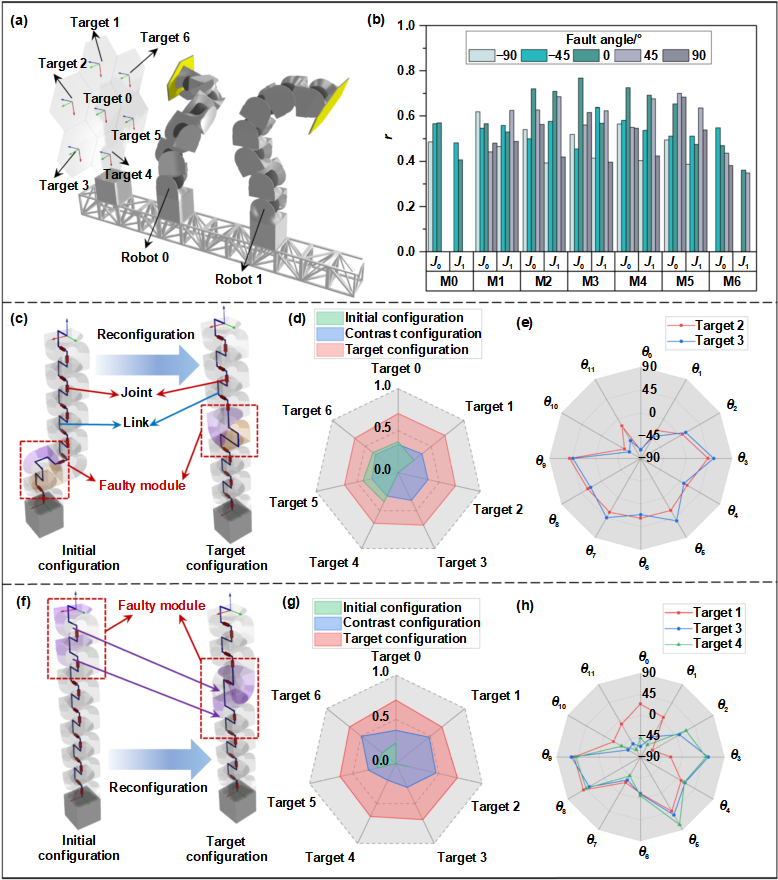
The cooperative reconfiguration regenerates the manipulation capability of modular robots. [Photo/hit.edu.cn]
The cooperative reconfiguration of modular robots (video). [Photo/hit.edu.cn]
HIT is the sole affiliation and corresponding institution in the paper. Professor Zhu from the School of Mechatronics Engineering is the corresponding author. Doctoral student Qi Jian is the first author. Professor Zhao Jie, Associate Researcher Zheng Tianjiao, Assistant Researcher Zhao Sikai, and doctoral students Zhao Ning, Yang Zhiyuan, Liang Dawei, Luo Hang, Han Kai and Sui Xin are co-authors.
This work was supported by the National Science Fund for Distinguished Young Scholars, the Key Program of the National Natural Science Foundation of China, and the Project of National Key Laboratory of Robotics Technology and Systems.
Paper link: http://www.ijemnet.com/article/doi/10.1088/2631-7990/ae6bde